
MOTOR SHIELD L298P Y L298N
Una de las características más llamativas que tiene la robótica es la capacidad de generar y controlar movimiento, de hecho en mi experiencia, cada vez que consultaba a los estudiantes por ¿Cómo se imaginaban un robot? respondían:
"Un robot debe ser como un humano, uno que pueda bailar", "Un robot es un brazo que juega ajedrez" o "Un robot es una sonda que camina en marte".
Independiente de la edad de los estudiantes, la respuesta apuntaba a una serie de componentes que unidos generaban movimiento. Es por ello que el día de hoy nos centraremos en aprender a programar motores DC con 2 Shields que nos permiten controlar la rapidez y sentido de giro.
SÍGUENOS EN
Motor Shield L298N
CARACTERÍSTICAS
-
Driver económico
-
Controla hasta 2 motores DC o 1 motor paso a paso bipolar
-
Corriente máxima 2A
-
Alimentación 4.8 - 32V (leer todo antes de conectar +12V)
ALIMENTACIÓN
Si bien este driver puede operar con voltajes de hasta 32V, debemos tener ciertas precauciones en su conexión.
Como observamos en la imagen de la derecha, la placa cuenta con 3 jumper, por el momento nos centraremos en el que se encuentra encerrado en amarillo. Dicho jumper permite establecer conexión con el regulador de tensión de la placa. Si el Jumper está conectado, podemos conectar hasta 12V en Vin y Logic/5V funcionaría como una salida de 5V.

Cuando el Jumper no está conectado, podemos conectar hasta 32V en Vin, pero la parte lógica del circuito quedara desconectada y necesitaremos conectar 5V en Logic.
CONEXIÓN Y PROGRAMACIÓN
Para controlar el sentido y rapidez de giro un motor DC utilizaremos los pines que se encuentran al lado de los bornes de alimentación de la placa. Cada motor es controlado por 3 pines, 2 controlan el sentido de giro (IN1-4) y 1 que controla la rapidez del giro (ENA-B).
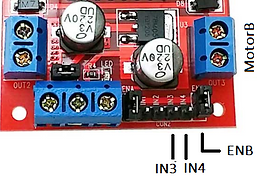
Notarán que en los pines ENA y ENB, por defecto se encuentran conectados dos jumper. Esto sirve cuando necesitamos controlar solo el sentido de giro. El jumper conecta el pin EN a 5V, lo que implica que la rapidez de giro será igual a la rapidez máxima. En el caso de querer controlar la rapidez de giro, podemos retirar el jumper y conectar el EN pin a una salida PWM de Arduino.
Debido a que el control de cada motor solo necesita 2 pines digitales (IN) y 1 salida PWM (EN), la programación se vuelve muy sencilla e incluso podemos controlar los motores en tiempo real con el modo en vivo de mBlock 5.
En la imagen de la derecha, se muestran las 3 cadenas básicas que se pueden usar. La primera controla los pines de trabajo y la rapidez base del motor. La segunda y tercera controlan el sentido de giro del motor. En el caso de que EN3 y EN4 se encuentren al mismo tiempo en estado alto o bajo, el motor se detendrá.
Es posible agregar nuevas cadenas para controlar en tiempo real la rapidez base de los motores.

Motor Shield L298P
CARACTERÍSTICAS
-
Driver más caro que L298N
-
Controla hasta 2 motores DC
-
Corriente máxima 2A por canal
-
Alimentación 4.8 - 24V (leer todo antes de conectar +12V)
-
Buzzer integrado (pin 4)
-
Conexión rápida para 2 Servomotores, módulo bluetooth, sensor de distancia y led RGB.
ALIMENTACIÓN
Si bien este driver puede operar con voltajes de hasta 24V, debemos tener ciertas precauciones en su conexión.
Como observamos en la imagen de la derecha, la placa cuenta con un Jumper (encerrado en amarillo). Dicho jumper permite establecer conexión con el regulador de tensión de la placa Arduino. Si el Jumper está conectado, la alimentación del Shield y Arduino se unificarán, lo que permitirá conectar hasta 12V desde el jack de arduino o desde la bornera del shield.

IMPORTANTE: Para evitar sobrecalentamiento en la placa Arduino, no se recomiendan usar Voltajes cercanos a 12V. En caso de necesitar conectar dicho voltaje para aumentar el rendimiento de los motores, se recomienda retirar el jumper y alimentar el Shield y Arduino por separado.
CONEXIÓN Y PROGRAMACIÓN
Para conectar nuestros motores podemos utilizar la bornera rotulada como Motor A y Motor B o los pines hembra encerrados en verde.

A diferencia del L298N, el control de cada motor solo requiere 2 pines, un pin digital y uno PWM. Los pines definidos para el control de motores son:
Motor A
-
Control rapidez de giro pin 10 (PWM)
-
Control sentido de giro pin 12 (Alto o Bajo)
Motor B
-
Control rapidez de giro pin 10 (PWM)
-
Control sentido de giro pin 12 (Alto o Bajo)
Al igual que en el motor shield L298N, podemos programar todo lo necesario en el modo en vivo de mBlock 5. La diferencia radica en que para detener el motor o motores en cuestión, es necesario llevar el pin que controla la rapidez de giro a 0. Para lograrlo podemos incluir un nuevo evento que cambie la variable speedA (en este caso) en valores de interes, por ejemplo, podríamos agregar el evento "Al presionar la tecla a", el bloque "cambia speedA por 25" y de la misma forma un evento que permita disminuir en 25 dicha variable.
